Il ponte ad H l298N controllato con Arduino
[et_pb_section bb_built="1" admin_label="section" _builder_version="3.0.47" locked="off"][et_pb_row admin_label="row" _builder_version="3.0.47" background_size="initial" background_position="top_left" background_repeat="repeat"][et_pb_column type="2_3"][et_pb_text _builder_version="3.8.1"]
Il ponte H l298N è sicuramente il più utilizzato per applicazioni in cui si devono controllare piccoli motori.
Il ponte H è un componente fondamentale per il controllo dei motori DC. Questo componente ci permette di controllare la velocità e i senso di rotazione del motore, a differenza di un semplice interruttore che ci permetterebbe solamente di lavorare in modalità ON/OFF. Capire come funziona il ponte H, ci consente di controllarlo con qualunque microcontrollore e scheda. ( Arduino, Raspberry, PIC, ARM ).
[/et_pb_text][et_pb_text _builder_version="3.0.92"]
Le nozioni di base che proponiamo in questo articolo non sono riferite ad un particolare ponte ad H anche se citeremo come esempio l' l298N, ma il principio di funzionamento è uguale per tutti.
[/et_pb_text][/et_pb_column][et_pb_column type="1_3"][et_pb_image _builder_version="3.4.1" src="https://www.steplab.net/wp-content/uploads/2018/05/pubblicita.png" url="https://www.steplab.net" /][/et_pb_column][/et_pb_row][et_pb_row admin_label="row" _builder_version="3.0.47" background_size="initial" background_position="top_left" background_repeat="repeat"][et_pb_column type="1_3"][et_pb_code admin_label="ponte H Amazon" _builder_version="3.0.92"]<iframe style="width:120px;height:240px;" marginwidth="0" marginheight="0" scrolling="no" frameborder="0" src="//rcm-eu.amazon-adsystem.com/e/cm?lt1=_blank&bc1=000000&IS2=1&bg1=FFFFFF&fc1=000000&lc1=0000FF&t=linkd-21&o=29&p=8&l=as4&m=amazon&f=ifr&ref=as_ss_li_til&asins=B01LYZ5FDY&linkId=193495c43ababf58c968be8daa941144"></iframe>[/et_pb_code][et_pb_image admin_label="Ponte H" src="https://www.steplab.net/wp-content/uploads/2016/07/ponte-h.jpg" _builder_version="3.0.92"]
[/et_pb_image][/et_pb_column][et_pb_column type="2_3"][et_pb_text admin_label="Contollare il ponte H" _builder_version="3.0.47" background_size="initial" background_position="top_left" background_repeat="repeat"]
- I ponti ad H acquistabili online sono numerosi e vanno dimensionati correttamente secondo le vostre esigenze personali. Si parte dai ponti particolarmente economici da pochi euro, fino ad arrivare a schede molto più sofisticate, che consentono di controllare decine di Ampere e che hanno costi di centinaia di euro. Le schede economiche hanno una scarsa protezione, montano i componenti essenziali, non hanno una grande affidabilità nel tempo. Le schede più costose, generalmente, sono "indistruttibili" perché contengono una serie di accorgimenti per prevenire le situazioni dannose che potrebbero presentarsi.
[/et_pb_text][et_pb_text admin_label="Contollare il ponte H" _builder_version="3.0.47" background_size="initial" background_position="top_left" background_repeat="repeat"]
In questo articolo vedremo:
- Principio di funzionamento del ponte ad H
- Come alimentare il ponte ad H
- Come controllare il ponte ad H con un microcontrollore
- Esempio: controllare il ponte con Arduino
[/et_pb_text][/et_pb_column][/et_pb_row][et_pb_row admin_label="row" custom_padding="27px|0px|0px|0px" _builder_version="3.0.47" background_size="initial" background_position="top_left" background_repeat="repeat"][et_pb_column type="4_4"][et_pb_text admin_label="Ponte ad H teorico" module_id="parte_teorica" _builder_version="3.8.1" background_size="initial" background_position="top_left" background_repeat="repeat"]
Funzionamento teorico del ponte ad H
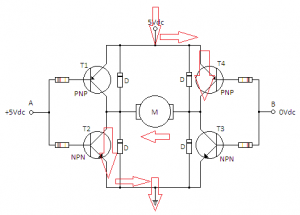
Il ponte ad H è un oggetto concettualmente semplice, ma molto potente perché ci permette di controllare elettronicamente sia la velocità che il senso di rotazione di un motore DC.Immaginate che T1, T2, T3, T4 siano semplicemente degli interruttori. Il motore, come si vede in figura è messo al centro (come la stanghetta di un'ipotetica H formata dagli interruttori e dal motore). La tensione di alimentazione è collegata a V+ in alto e GND in basso.
Immaginate ora che, in qualche modo, chiudiamo gli interruttori S1 ed S4 lasciando aperti S2 e S3. La corrente entrerà dal lato sinistro del motore e andrà al lato destro. Quindi il (+) del motore sarà a sinstra e il (-) sarà a destra.
Ora immaginate di fare il contrario, chiudiamo l'interruttore T2, T3 e lasciamo aperti T1, T4. La corrente ora entrerà a destra nel motore e uscirà a sinistra. Quindi il (+) del motore è a destra e il (-) del motore è a sinistra. Questa operazione equivale a "girare i cavi" di alimentazione del motore. Ora questa operazione si può gestire in modo digitale. Il ponte in figura è costruito in modo tale che quando A è pari a 0V T1 sarà chiuso ed T3 sarà aperto. Se A è pari a 5V T1 sarà aperto ed T3 sarà chiuso. Ripetendo il ragionamento con il piedino B otterremo che se A e B sono opposti attiveremo ora un ramo ora l'altro del circuito ed otterremo esattamente quanto spiegato sopra, cioé lo scambio di polarità sul motore.
[/et_pb_text][et_pb_text admin_label="Adsense" module_id="parte_teorica" _builder_version="3.0.89" text_font="||||" text_font_size_tablet="14" text_font_size_phone="14" text_letter_spacing_tablet="0px" text_letter_spacing_phone="0px" text_line_height_tablet="1.7em" text_line_height_phone="1.7em" header_font="||||" header_font_size_tablet="30px" header_font_size_phone="30px" header_letter_spacing_tablet="0px" header_letter_spacing_phone="0px" header_line_height_tablet="1em" header_line_height_phone="1em" background_size="initial" background_position="top_left" background_repeat="repeat" use_border_color="off" border_color="#ffffff" border_width="1px" border_style="solid" saved_tabs="all" background_layout="light" text_orientation="left" global_module="11190"]
[/et_pb_text][et_pb_text admin_label="Ponte ad H reale" _builder_version="3.8.1" background_size="initial" background_position="top_left" background_repeat="repeat"]
Utilizzo del ponte ad H reale
Il ponte ad H l298N può controllare 2 motori DC e sostenere una potenza complessiva di 25W senza problemi. Guardano la scheda consideriamo lato posteriore quello con il dissipatore, anteriore quello con i morsetti e i controlli. La scheda presenta un morsetto azzurro a tre ingressi sul lato frontale. Per poter utilizzare questa scheda abbiamo bisogno di un alimentatore che possa fornire una tensione > 6V. Si può utilizzare un normale alimentatore casalingo. I cavi dell'alimentatore andranno collegati all'ingresso 12V e GND. Non collegare nulla al 5V.
Vicino al morsetto a 3 ingressi, troviamo una serie di Pin. Alle estremità abbiamo 2 jumper che possono essere estratti per disabilitare uno o l'altro lato della scheda di controllo.
I 4 pin centrali sono i nostri A,B dei due motori, chiamati in questo caso IN1,IN2,IN3,IN4.
Sui lati della scheda troviamo 2 morsetti a due poli. Questi morsetti vanno collegati ai motori che vogliamo controllare. La polarità non è importante perché, come abbiamo visto, il ponte può invertire elettronicamente i poli.
[/et_pb_text][et_pb_text admin_label="Adsense" module_id="parte_teorica" _builder_version="3.0.89" text_font="||||" text_font_size_tablet="14" text_font_size_phone="14" text_letter_spacing_tablet="0px" text_letter_spacing_phone="0px" text_line_height_tablet="1.7em" text_line_height_phone="1.7em" header_font="||||" header_font_size_tablet="30px" header_font_size_phone="30px" header_letter_spacing_tablet="0px" header_letter_spacing_phone="0px" header_line_height_tablet="1em" header_line_height_phone="1em" background_size="initial" background_position="top_left" background_repeat="repeat" use_border_color="off" border_color="#ffffff" border_width="1px" border_style="solid" saved_tabs="all" background_layout="light" text_orientation="left" global_module="11190"]
[/et_pb_text][et_pb_text admin_label="Controllo con Arduino" _builder_version="3.8.1" background_size="initial" background_position="top_left" background_repeat="repeat"]
Controllare il ponte con Arduino
Una volta collegato il ponte ai motori e all'alimentatore vedrete che non succederà assolutamente nulla. Questo perché manca il "cervello", cioé il famoso segnale di controllo che abiliterà il nostro motore controllando velocità e senso di rotazione.
Come abbiamo spiegato all'inizio nella parte teorica per controllare il motore abbiamo bisogno di 2 segnali che siano uno l'opposto dell'altro. Se vogliamo che il motore giri in un senso dobbiamo mettere A a 0V e B a 5V, se vogliamo invertire metteremo A a 5V e B a 0V.
Per regolare la velocità è sufficiente modulare la durata dei 5V sul piedino che stiamo utilizzando in quel momento, lasciando l'altro perennemente a 0V.
Per fare questo possiamo utilizzare alcuni piedini particolari di Arduino che consentono di utilizzare il PWM. I piedini digitali con questa funzionalità sono marcati con una ~ vicino al numero del piedino.
Vediamo ora gli aspetti pratici con due metodi di controllo diversi:
[/et_pb_text][et_pb_text admin_label="Adsense" module_id="parte_teorica" _builder_version="3.0.89" text_font="||||" text_font_size_tablet="14" text_font_size_phone="14" text_letter_spacing_tablet="0px" text_letter_spacing_phone="0px" text_line_height_tablet="1.7em" text_line_height_phone="1.7em" header_font="||||" header_font_size_tablet="30px" header_font_size_phone="30px" header_letter_spacing_tablet="0px" header_letter_spacing_phone="0px" header_line_height_tablet="1em" header_line_height_phone="1em" background_size="initial" background_position="top_left" background_repeat="repeat" use_border_color="off" border_color="#ffffff" border_width="1px" border_style="solid" saved_tabs="all" background_layout="light" text_orientation="left" global_module="11190"]
[/et_pb_text][/et_pb_column][/et_pb_row][et_pb_row custom_padding="0px|0px|27px|0px" make_equal="on" _builder_version="3.0.75"][et_pb_column type="1_2"][et_pb_blurb title="Il controllo Velocità - Direzione" url="https://www.steplab.net/controllo-di-un-motore-dc-velocita-direzione/" image="https://www.steplab.net/wp-content/uploads/2017/09/halfBPWM_w400.png" _builder_version="3.0.75" border_style="solid"]
[/et_pb_blurb][/et_pb_column][et_pb_column type="1_2"][et_pb_blurb title="Il controllo Locked - Antiphase" url="https://www.steplab.net/controllo-di-un-motore-dc-locked-antiphase/" image="https://www.steplab.net/wp-content/uploads/2017/09/lcoked-antiphase-scheme.png" _builder_version="3.0.75" border_style="solid"]
[/et_pb_blurb][/et_pb_column][/et_pb_row][/et_pb_section]
Lascia un commento
Devi essere connesso per inviare un commento.